工学部公開講座「ひと・社会・工学 -工学のいまを知る-」, 2019
エネルギーと機械 ーワットから250年、アポロ11号から50年などの歴史もふまえて 吉田 英生(工学研究科 教授)
学部では、「ひと・社会・工学 -工学のいまを知る-」をメインテーマとして、広く一般市民の方々を対象に「工学部公開講座」を開催します。 工学部の教員3名が、それぞれの専門分野に関する最近の研究事例を紹介・解説し、参加者の皆さまからの質問にお答えします。
講義詳細
- 年度・期
- 2019年度・前期
- 開催日
- 2019年7月27日
- 開講部局名
- 工学部
- 使用言語
- 日本語
- 教員/講師名
- 吉田 英生(工学部 教授)
西野 恒(工学部 教授)
冨島 義幸(工学部 教授)
- 開催場所
- 京都大学吉田キャンパス総合研究8号館3階NSホール
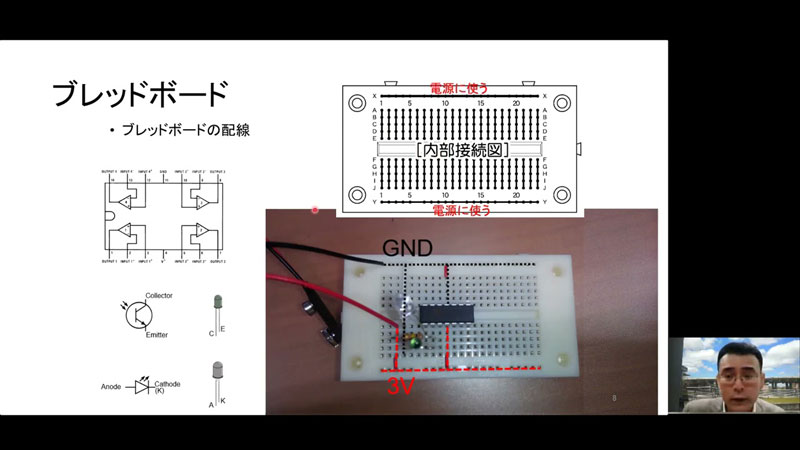
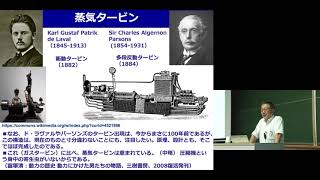
1.エネルギーと機械 -ワットから250年、アポロ11号から50年などの歴史もふまえて-」
吉田英生 工学研究科教授(工学部物理工学科)
2019年は、産業革命を導いたワットの大発明から250年、またアポロ11号の月着陸から50年にあたります。そこでエネルギーと機械が築いてきた歴史をふりかえるとともに、最新のトピックスについてもお話したいと思います。
2.「まぼろしの巨塔を復元する -法勝寺八角九重塔はどのような姿だったのか-」
冨島 義幸 工学研究科教授(工学部建築学科)
日本に残る、もっとも高い木造の塔は東寺五重塔で約56m。かつて京都には、これをはるかにうわまわる法勝寺の九重塔が立っていました。しかも、形はふつうの四角ではなく八角形。今ではまぼろしとなったこの巨塔の復元を、建築学や歴史学の視点から考えます。
3.「AIで視る」
西野 恒 情報学研究科教授(工学部電気電子工学科)
計算機に視覚を持たせることを目的とするコンピュータビジョンの研究は、顔認識から自動運転やロボットの視覚に至るまで、我々の生活になくてはならない基盤技術として人工知能研究を牽引してきました。本講演では、材質認識、雑踏における人物行動解析、水の見えのモデル化などを例に、人間が暗黙の内に見ているもの、あるいは見えていないものをコンピュータで見る方法について論じます。